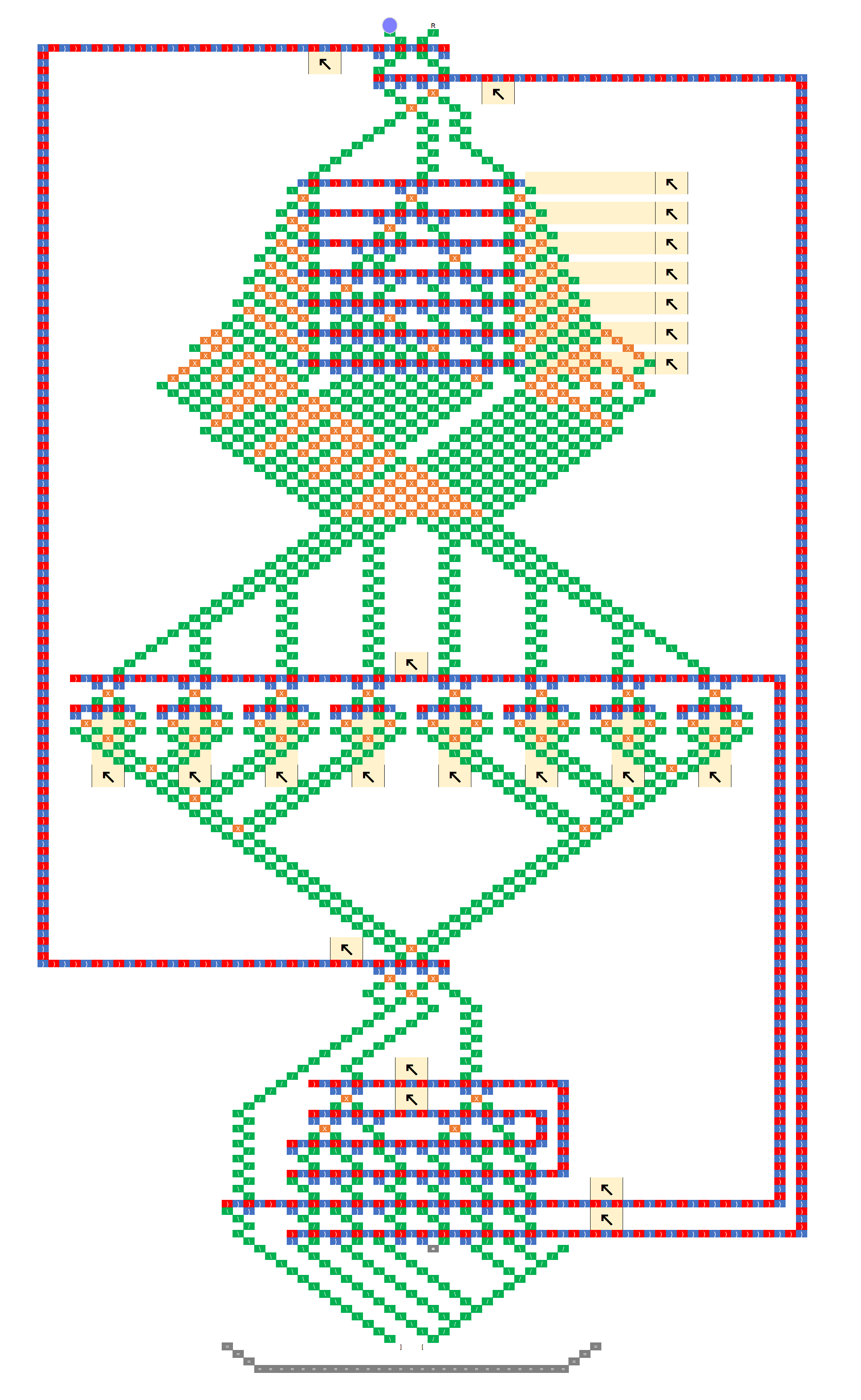
After looking at this longer, and building up intuition from thinking about the solution of computing an arbitrary function, I think I understand this reasonably well, and cannot see why this wouldn’t work. In short, I think it would correctly be able to compute each generation of a finite (fixed-window) cellular automaton with a single marble pass, which could then trigger a new marble.
While I said “ingenious” above, I’ll repeat it: This is ingenious! Very nice stuff!
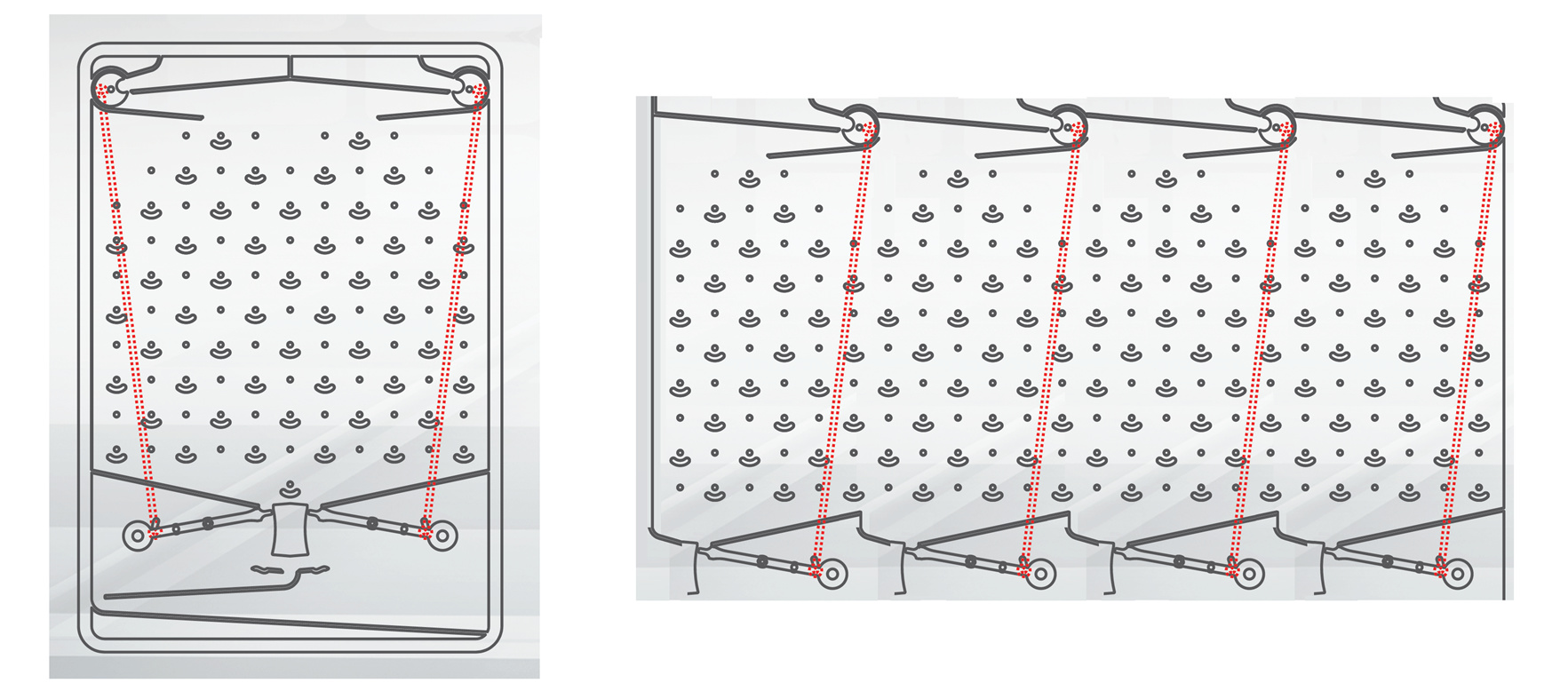
If we want to talk about Turing-completeness, we need an infinite number of cells (I’m not sure whether the proof of Turing-completeness of rule 110 required 2-way infinite, or just 1-way. I’m assuming 1-way is sufficient. If 2-way is required for some reason, I don’t see how that can be achieved here, since the ball has to start dropping somewhere). This would mean that you’d have no looping, but just an infinite stretch of these going down. I think that remains in the spirit of a TT-computation, because we need to incorporate unbounded storage somehow, so there will need to be an infinity of parts somewhere, be it like this, or via a sliding “tape” of bits mentioned elsewhere. But, in this model, we need to assume that a ball drop would have to pass through an infinite number of units before a second ball drop is triggered. Is this an unreasonable assumption - it might stretch the notion of a finite computation a little. I don’t know. But note that with rule 110, a 0 cell surrounded by 0s stays as 0 in the next generation. So, at any time, the number of changes needed to the array of cells is finite. It would be nice if we could incorporate a marker indicating where the end of the information is, so that the ball could exit the infinite array and trigger a new ball.
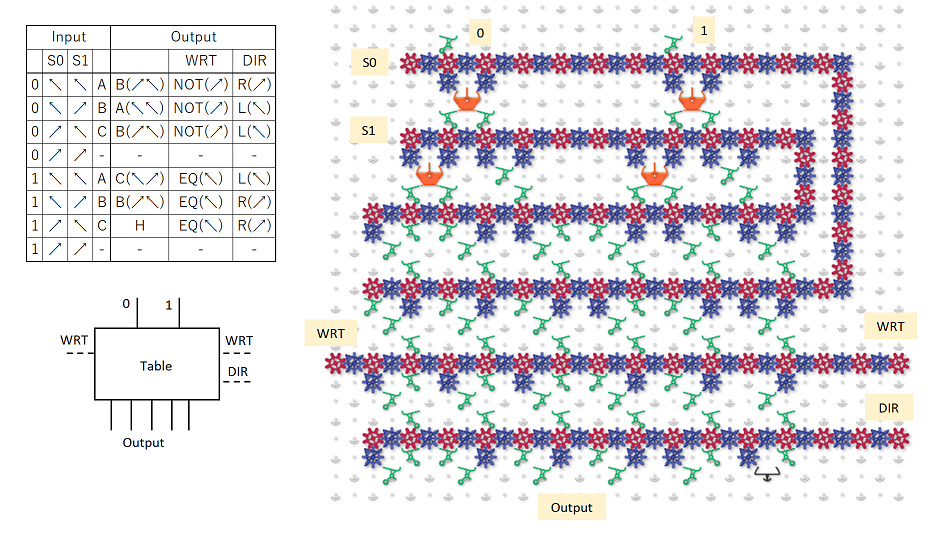
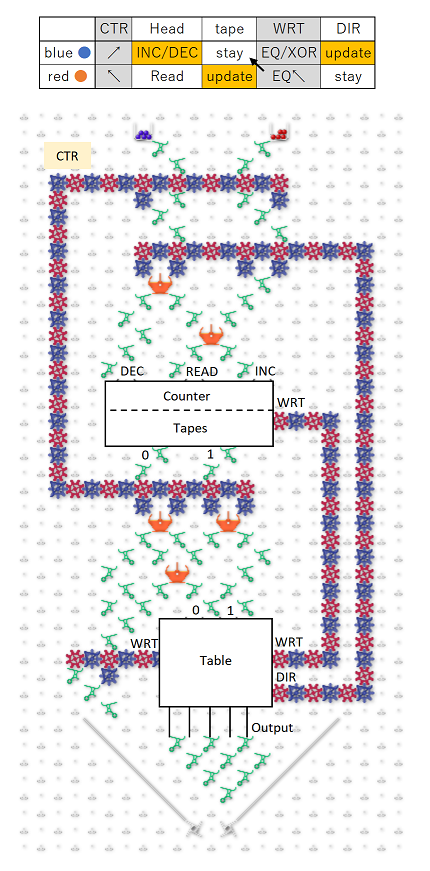
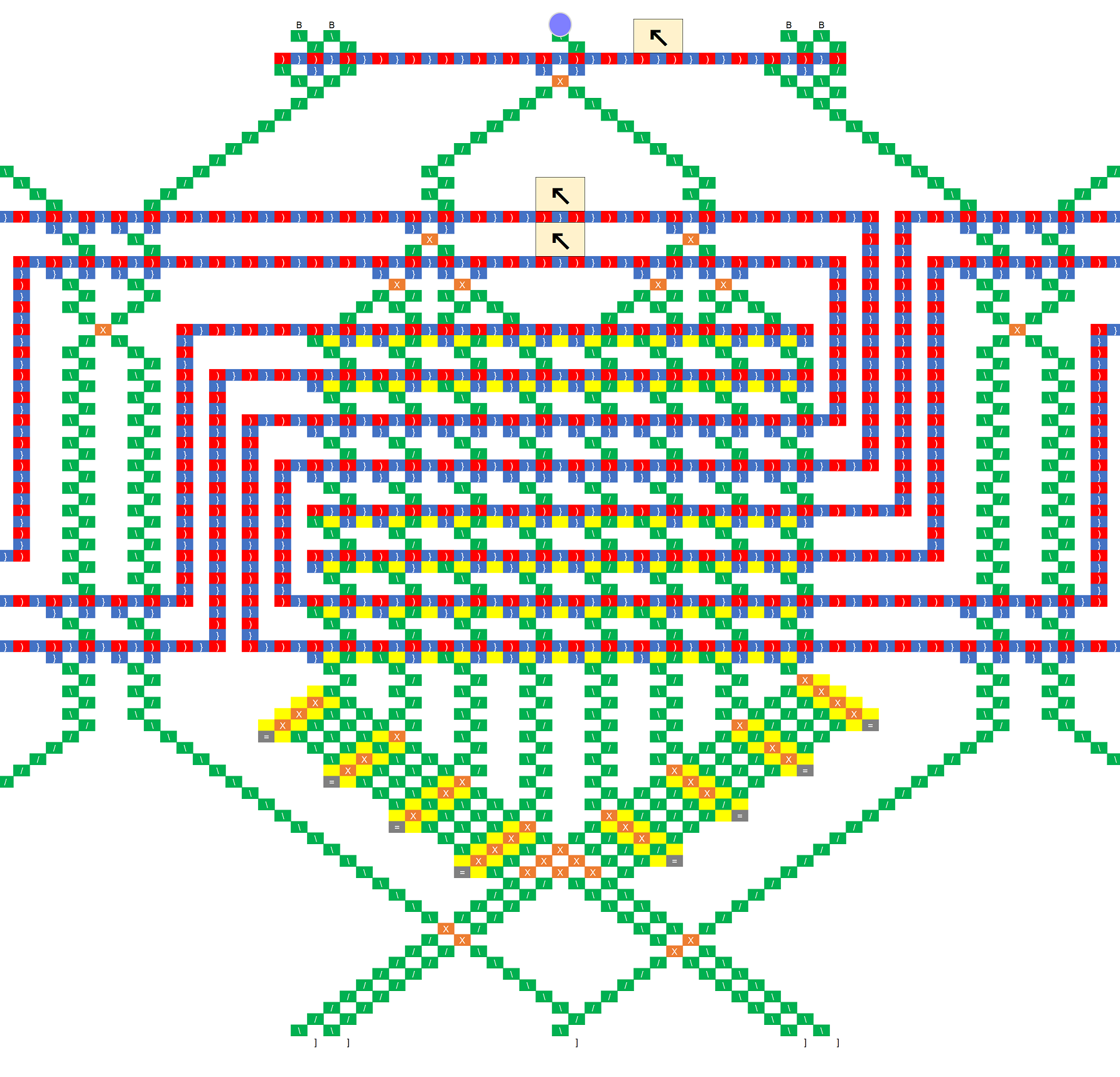
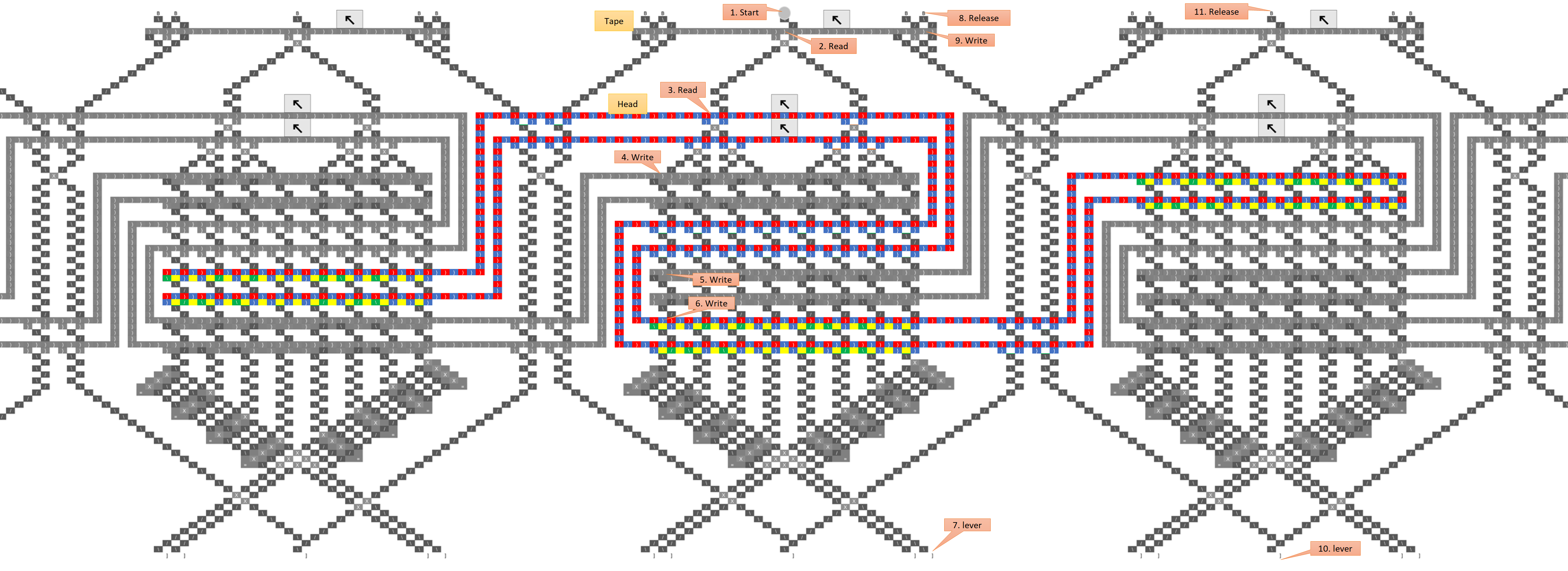
If you (or anybody) has a chance, please take a look at and verify my post on computing arbitrary functions, either from N–> N bits (to simulate one cycle of a processor), or similarly an arbitrary finite state machine, both here . These use your nested Cs. I think it’d be easy to extend the finite state machine approach to simulate a TM if we assume an infinite horizontal array of bits that can slide relative to the finite control (and levers that can be used to trigger the sliding action). (Not sure that is a reasonable extension of the TT model.)